Interactive 3D Model
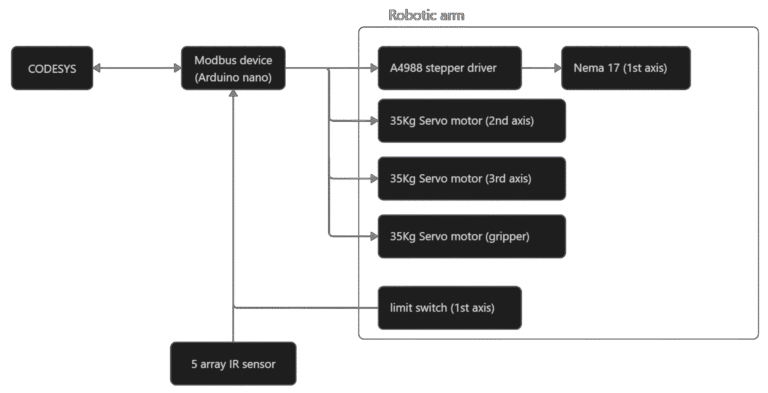
System Architecture
CODESYS interaction with Robotic arm
At the hardware level, an Arduino Nano provides direct control over the robotic arm’s motors and their drivers. The Arduino is configured as a Modbus slave, establishing a communication link with the master controller in CODESYS. This PLC environment governs the arm’s operational sequences. A cloud connection integrates the system, enabling remote commands such as startup, shutdown, and emergency stops. The cloud connection also facilitates comprehensive data logging, capturing metrics like operation counts, energy usage, and financial costs into an accessible Excel format.
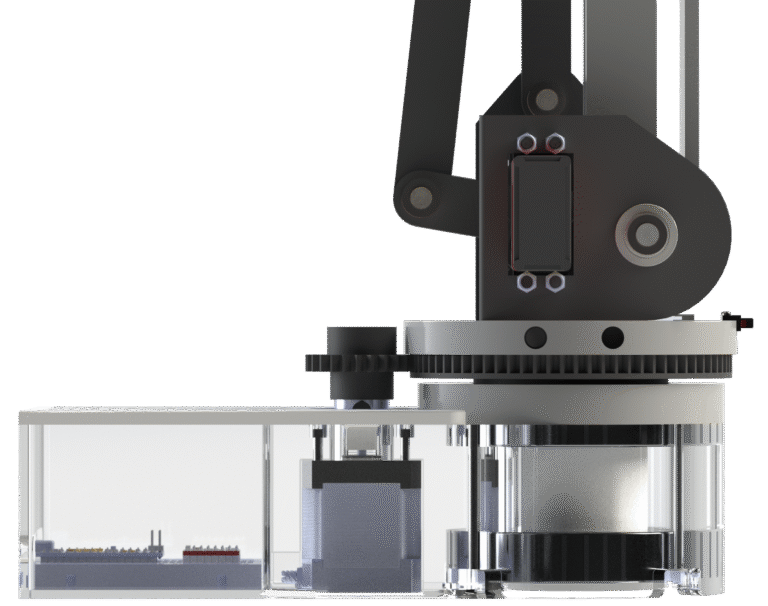
Object Measuring Hardware
At the hardware level, an Arduino Nano provides direct control over the robotic arm’s motors and their drivers. The Arduino is configured as a Modbus slave, establishing a communication link with the master controller in CODESYS. This PLC environment governs the arm’s operational sequences. A cloud connection integrates the system, enabling remote commands such as startup, shutdown, and emergency stops. The cloud connection also facilitates comprehensive data logging, capturing metrics like operation counts, energy usage, and financial costs into an accessible Excel format.
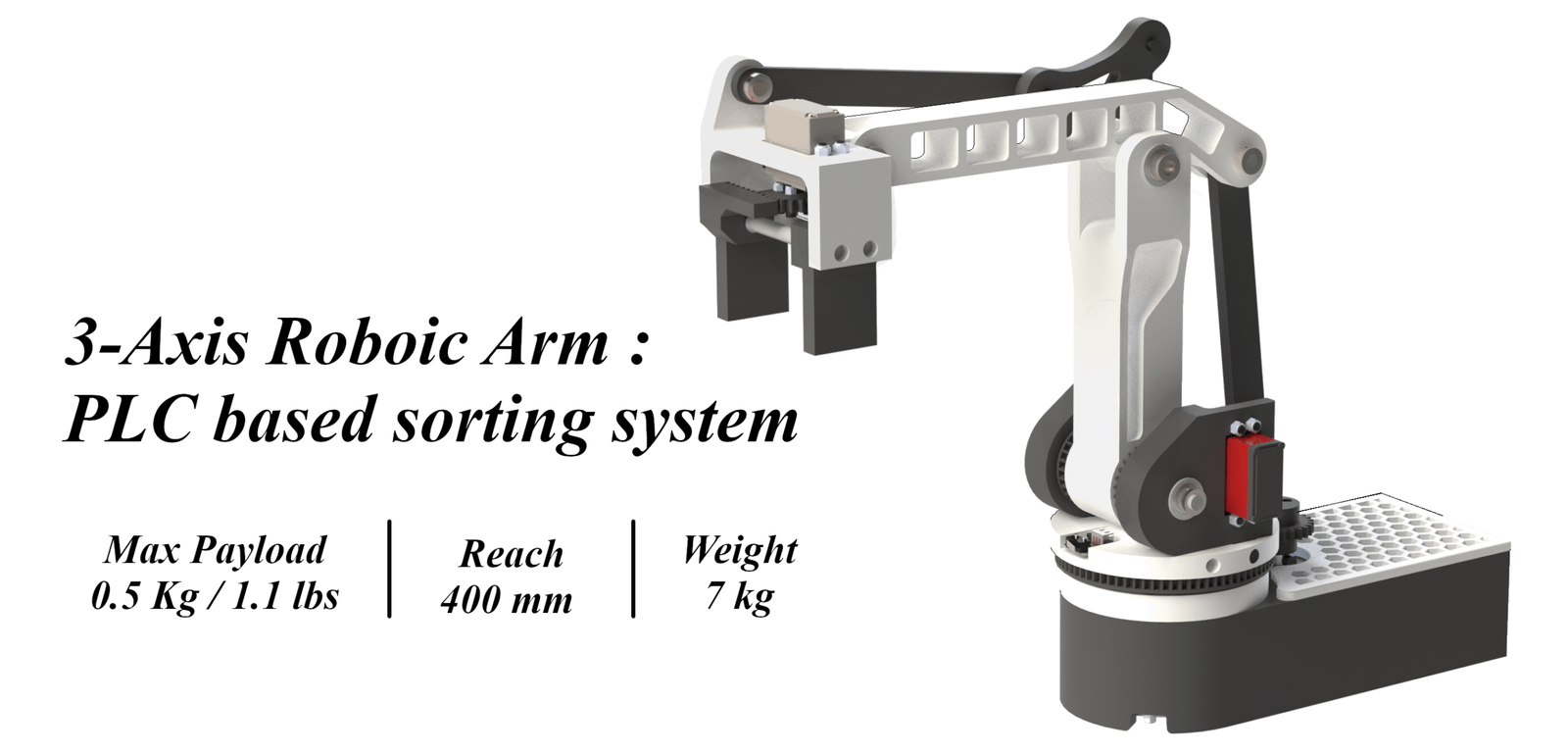
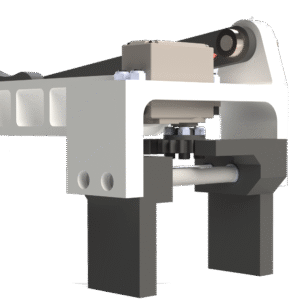
Arm Gripper Features
The gripper mechanism was designed for rapid tool change capability. The finger clippers can be easily replaced, allowing quick switching between different gripper types. This modular design accommodates various end-effector options including soft grippers for delicate objects, solid grippers for rigid handling, or specialized tools that can be mounted onto the arm as needed.
Thoughts on the project